RESEARCH INTERESTS
- Form-finding methods for cable and tensile structures
- Optimized sensor placement for civil structures
- Structural dynamics
- Machine learning and robotics for civil structures
- Damage mitigation and risk assessment in large-scale structures
- Adaptive and deployable structures
RESEARCH STATEMENT
Our research seeks to create new lightweight, adaptive, and deployable structures with innovative control and machine learning techniques to address the world’s ever-changing environmental challenges. Current infrastructure is designed and built such that it must simultaneously comply with all possible loads. This leads to overdesigned structures that are inefficient in terms energy and cost. A structure that can self-identify damage, adapt, and learn for future events addresses the emerging field of intelligent infrastructure and structural health monitoring. Emerging technologies for civil engineering structures include a combination of sensing with real-time active feedback control which includes form-finding methods, structural dynamics, statistical diagnostic tools, sensor placement optimization, robotics, and multi-scale experimental testing.
Current work
Modular aluminum tensegrity roof grids

This work in collaboration with the Institute for Sustainability, Energy, and Environment (iSEE) and Facilities and Services at UIUC, will look to build an aluminum bike parking canopy with a tensegrity roof. This modular design is easily assembled by hand and constructed such that it is compliant with wind and snow loads while maintaining adequate stiffness. Aluminum alloys will be studied in collaboration with Prof. Nishant Garg and are of interest since it is corrosion resistant and lightweight.
Adaptive robotic tensegrity civil structures
This work is studying the adaptive behavior of a robotic tensegrity roof structure. Biomimetic behavior includes aspects such as learning from previous experience, self-diagnosis, and adaptation. Simulations of the structure are improved from previous work to include friction effects of cables sliding over joints. Despite improved simulations, testing shows that significant uncertainties in the behavior of the structure remain. Special methodologies for feedback control using simulations and measurements are required.
Adaptive origami structures
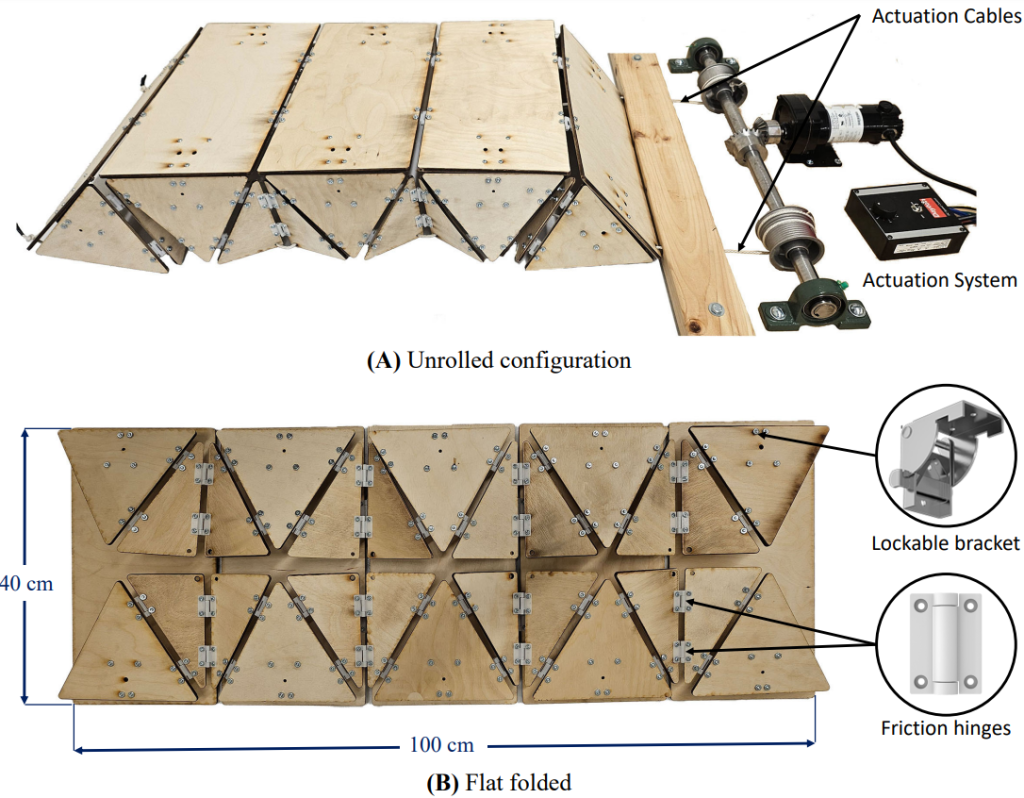
In the quest for sustainable innovation, structural engineers are turning their attention to transformative solutions in the form of adaptive structures, designed to respond to the ever-changing demands of dynamic environments. Venturing beyond conventional approaches, origami’s inherent deployability offers a compelling blueprint for achieving this goal. Integrating biomimetics further unlocks transformative possibilities by mimicking the designs of nature. This paper presents the construction of a meter-scale prototype of the origami pill bug, a novel design inspired by the morphological characteristics and adaptability of pill bugs. The study delves into the dynamic behavior of the structure as it deploys, utilizing an optical measurement system to analyze the structure’s shifting natural frequencies. By comparing analytical and experimental results, the study aims to identify and evaluate any modeling uncertainties between the finite element model and the physical prototype.
Multilayered randomly architected material (MLRAM)
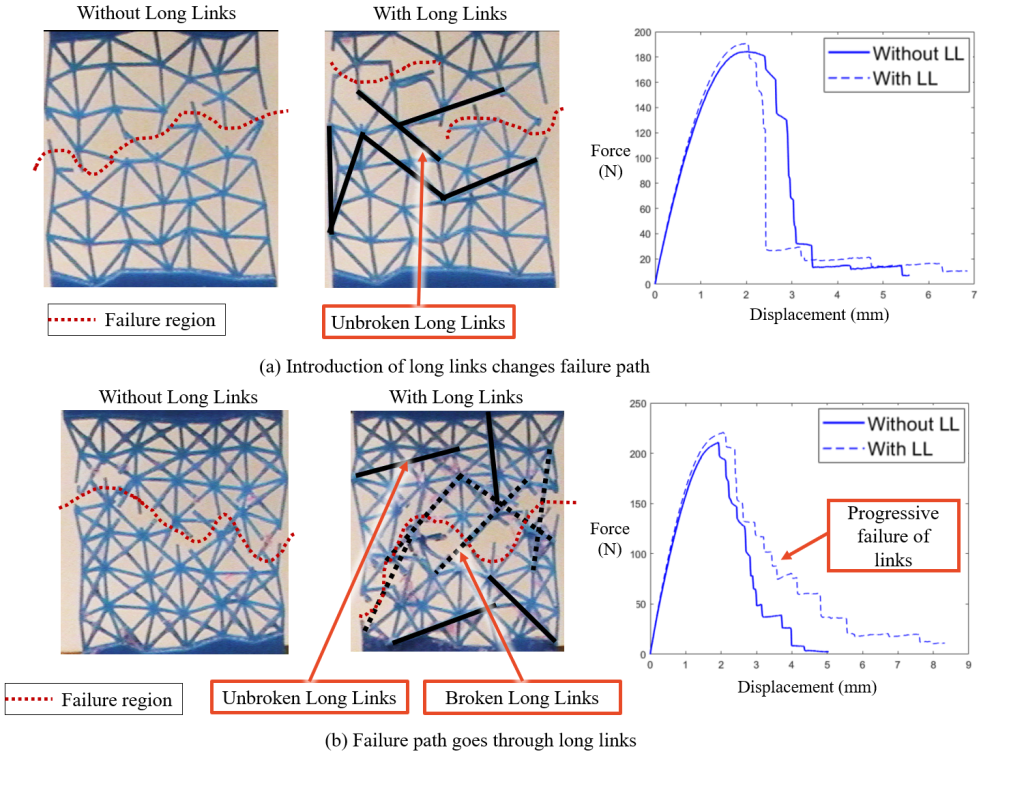
This work seeks to characterize relationship between various parameters of Multi-Layered Randomized Architected Material (MLRAM) and its tensile behavior. The randomization of link orientation is to address unknown direction of the critical force in the strut. A computational model calibrated through experimental testing is developed that mimics the tensile behavior of MLRAM. Using this model, the variation in the tensile behavior in terms of peak tensile capacity and post-peak behavior of MLRAM is studied for various geometry with specific parameters. From the study, it is observed that the tensile capacity and stiffness of the MLRAM increase with a higher coordination number.
Deployable and compliant geostructural systems
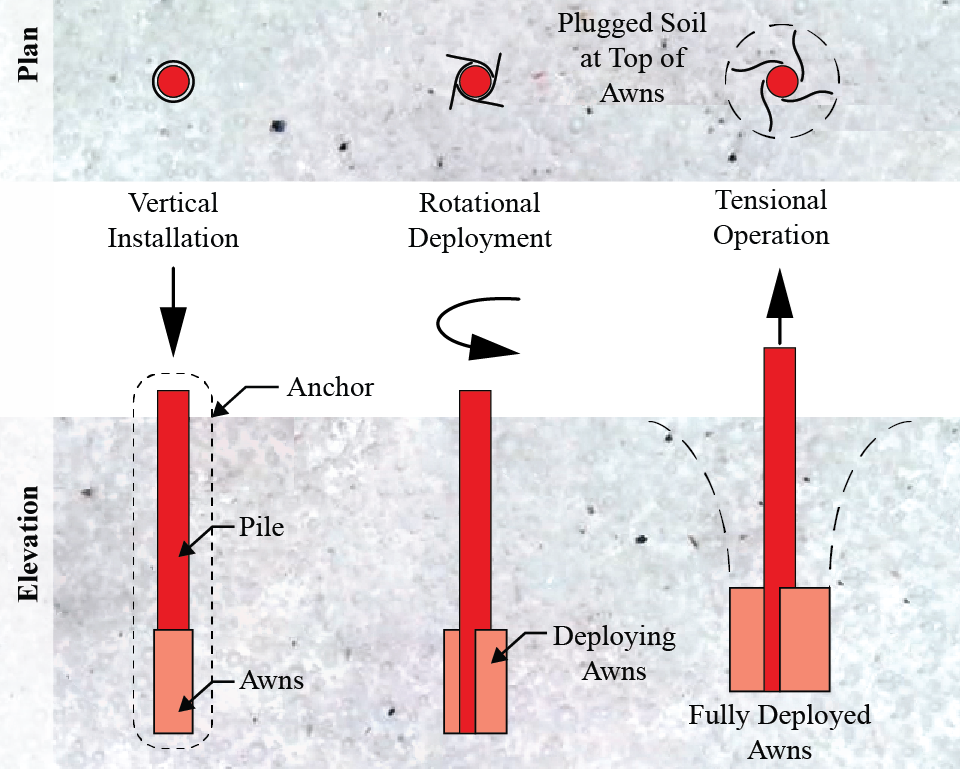
![]()
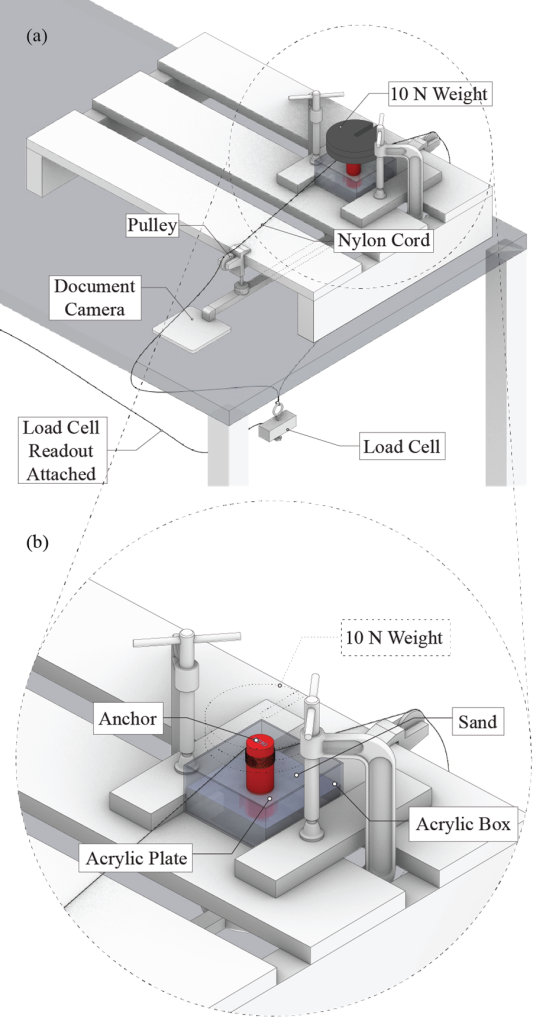
This work seeks to advance self-installing ground instrumentation and vessel anchors through a novel geo-structural concept utilizing deployable, compliant structural members to enhance tension capacity. These structural members are biologically-inspired from cheatgrass awns. We are investigating structural properties and alignment of this geometrically nonlinear system.
Available code upon request:
- Cable sliding friction for Dynamic Relaxation
- Panel and crease folding stiffness for Dynamic Relaxation